Workroid! is set to revolutionize the workplace starting in 2022, marking the beginning of a new era
Introducing SPD1, a cooperative robot for sewage inspection
“Efficient solution to chronic manpower shortages and sewer inspection work.”
Kyoto city (Nov. 8,2022), tmsuk has been developing “workroids” robots that perform practical tasks while coexisting with humans. This time, following a request from a road and sewer maintenance company, tmsuk developed the first prototype of a spider-like robot called “ SPD1” to improve the efficiency of sewer inspections and to help with maintenance tasks.

Promotional video URL: https://youtu.be/oZp6XISLtkw
Development background
SPD1 was developed in consideration of the aging situations of sewer pipelines, which rapidly increased maintenance in the 1970s. The total length of sewer pipelines nationwide is about 490,000 km, and about 25,000 km (5% of total length) have surpassed the standard life span of 50 years. In 10 years, this number will increase to 82,000 km (17%) and in 20 years to 190,000 km (39%), which will continue to increase rapidly. In addition, manpower shortages are particularly pronounced in the sewer construction industry, where inspections and repairs are not expected to be completed.
Therefore, as a new attempt to respond to the diversifying needs that are expected to continue to increase in the future, we have developed a multi-legged walking type sewer inspection robot with high versatility.
Points
- One of Japan’s first multi-legged walking type robot for sewer inspection.
Compared to 90% or more of the equipment currently used in Japan for inspecting sewer pipes are wheel-driven with camera attachments. A multi-legged walking robot can adapt in many different environments, and does not get easily stuck between obstacles unlike the wheeled robots. In the future, it will be possible to apply it not only for sewer construction but also to operate in spaces too narrow for people to enter.
- SPD1 can operate through pipes of different diameters.
The legs are designed to flexibly follow the diameter of the pipe.
- SPD1 can conduct inspections and operations either individually or in a group.
A formation of having the first robot check the front, the second robot records the inspection site, and the third robot perform necessary operations.
- Equipped with a 360-degree camera.
No need to point the camera at the target, eliminating the need for complicated operations.
- Operated using a game controller, allowing for intuitive operation
Intuitive operation is possible
Future Prospects
We plan to announce the commercial model of “SPD1” after conducting demonstration tests at a sewer pipe survey site. Furthermore, as it is based on generic robot technology, we believe that it can be applied to surveys and work in narrow places that are inaccessible to people, in addition to sewer construction, by adding an arm that can perform the work and other functions.
Overview
A multi-legged walking robot for inspecting sewer pipes.
- Specifications
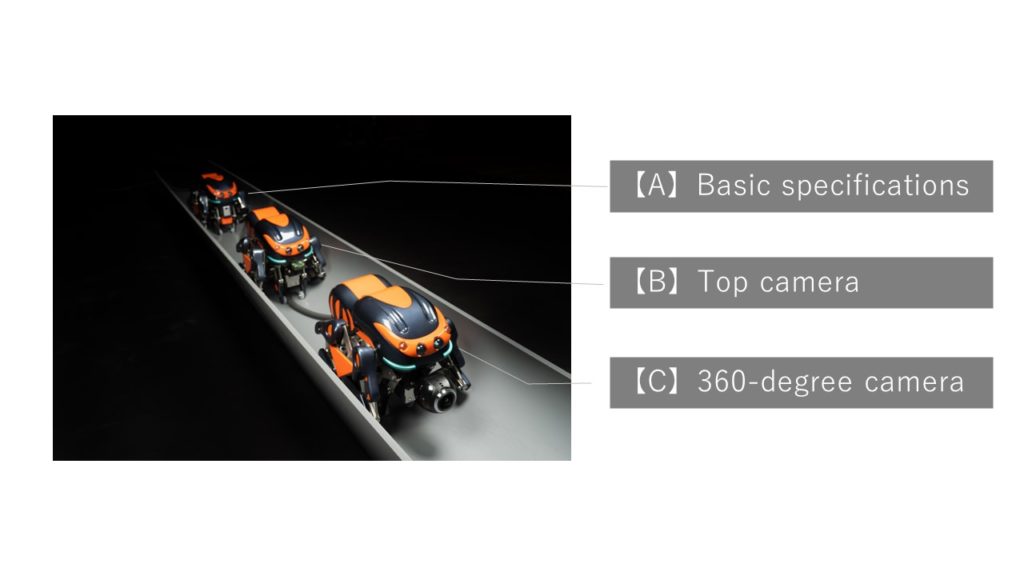
| Name/Model | Multi-legged walking robot “SPD1” (prototype) | ||
| Size | 【A】Basic Specification
21×25×25cm |
【B】Top camera
21×25×28cm |
【C】360-degree camera
21×25×28cm |
| Camera performance
|
Raspberry Pi Camera V2
Field of view:horizontal 62.2°×vertical 48.8° |
XDV360
Angle of view:220°(Whole circumference) |
|
| Weight | About 3.5kg/1 unit | ||
| Applicable pipe diameter | φ200~300mm | ||
| Power source/
Driving voltage |
Non-battery powered/DC 12.5V | ||
| Communication | Wired LAN cable | ||
| Operation method | Controller-operated | ||
※As of November 8th, 2022